


【自有技术大讲堂】浅谈光度立体技术原理
光度立体法,最早起源于MIT人工智能实验室的Robert J.Woodham教授。他在1979年的论文《Photometric stereo: A reflectance map technique for determining surface orientation from image intensity》,以及1980年的论文《Photometric Method for Determining Surface Orientation from Multiple Images》中系统的阐述了整套经典光度立体技术的理论框架[1] 。
与传统三角法计算的立体方法不同,光度立体法由于成像几何结构没有改变,图像各点之间的对应关系是提前确定的。在论文中,Woodham教授提出了三个基本假设来对应完成整套理论框架的推演搭建。即[2]:
1、假定相机是正投影成像。
2、假定每一个光源发射的光束是平行且均匀的。Woodham教授在文中指出,可采用观察距离远大于目标尺寸的点光源或者具有均匀照明强度的远心照明光源替代,详细如图所示[3] 。
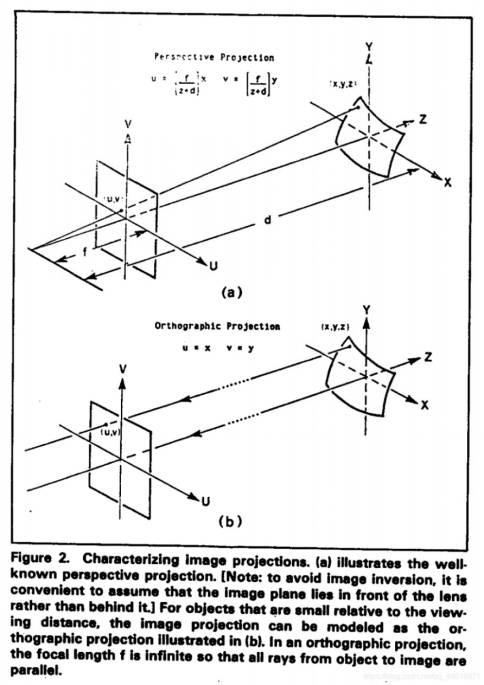
Figure 1 不同发射源下物像点表面辐射与辐照度关系
3、物体必须满足朗伯体反射特性,即它必须以漫反射的方式反射入射光。
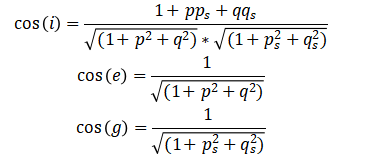
Woodham教授在此三个假设的基础之上,物像点表面辐射与辐照度关系进行一一对应。对于一个固定光源和观察者的几何光学系统,表面辐射和辐照度的比值仅仅和梯度p,q有关。反射图R(p,q)可以确定图像强度。给定表面法向量[p,q,-1],入射向量[ps,qs,-1],观察向量[0,0,-1],(i:入射角;e:出射角;g:相角)则有
采用理想简化的表面反射模型来表示当前情况。假定物体是朗伯体,从各个角度观察到的亮度一致。反射系数设为。当采用观察距离远大于目标尺寸的点光源入射时

当具有均匀照明强度的远心照明光源入射时

利用反射图,最终成像过程可简化为非线性一阶偏微分方程
![]()
由于只有一个已知量I,需求出对应p,q。故需要利用两张或更多图片来进行求解。当存在多张图片时,可根据图像RGB灰度分布信息进行合成转成梯度、反射率、高度场分布图[4]。
现有应用过程中又常根据使用情况进行分类为标定光度立体、未标定光度立体、半标定光度立体,对应已知未知量与唯一解条件如下图所示[5]:
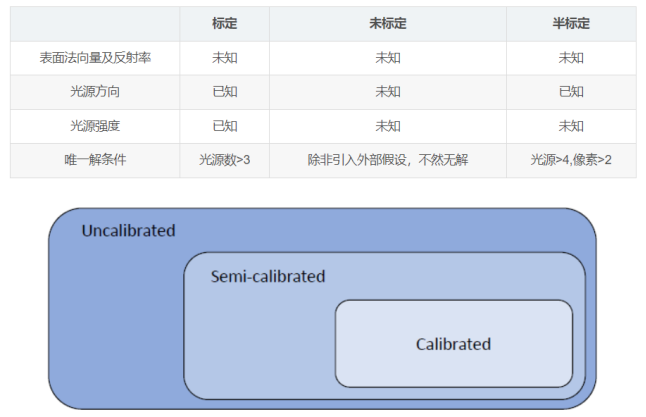
Figure 2 光度立体法已知未知量与唯一解条件对应关系
与传统立体视觉相比,光度立体可以很轻易识别两图像中的对应点,而传统方法做不到;可以计算出表面的反射系数;在许多情况下,用表面方向来描述物体形状比用基准面以上距离或高度来描述要好。
由于该方法特殊性,当前常用于进行多视角样品三维形貌复现,而在视觉检测领域中最典型的即为样品的凹凸缺陷检测识别。如下图所示即为对应光度立体图片用于检测适配器外壳上的标签凸起。当然,本文描述的为基础的朗伯体光度立体成像法,随着研究的不断深入,朗伯体光度立体法无法满足现实场景的复杂多变特性[6],在计算机视觉领域亦发展延伸出了非朗伯体表面的光度立体法,诸如鲁棒性估计法[7] 、复杂反射模型法[8]、基于实例的方法[9]和基于深度学习的方法等,本文就不在此一一描述。

Figure 3 适配器外壳光度立体成像效果图
参考文献
[1] https://www.jianshu.com/p/c8391a848425
[2]https://blog.csdn.net/weixin_43603658/article/details/128137955?utm_medium=distribute.pc_relevant.none-task-blog-2~default~baidujs_baidulandingword~default-0-128137955-blog-112724439.235^v38^pc_relevant_yljh&spm=1001.2101.3001.4242.1&utm_relevant_index=3
[3] Woodham R J. Photometric method for determining surface orientation from multiple image[J] . Optical Engineering, 1980, 19(1):191139.
[4] https://blog.csdn.net/qq_44516871/article/details/104594567
[5] https://blog.csdn.net/SZU_Kwong/article/details/112724439
[6] 付琳,洪海波,王晰,肖高博,任明俊. 基于逆向反射模型的非朗伯光度立体视觉[J]. 光学学报,2020,40(5):0520001.
[7] Ikehata S, Aizawa K. Photometric stereo using constrained bivariate regression for general isotropic surface[C] // 2014 IEEE Conference on Computer Vision and Pattern Recognition, June 23-28, 2014, Columbus, OH, USA. New York: IEEE, 2014: 2187-2194.
[8] Hertzmann A, Seitz S M. Example-based photometric stereo: Shape reconstruction with general, varying BRDFs[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2005, 27(8): 1254-1264.
[9] Santo H, Samejima M, Sugano Y, et al. Deep photometric stereo network[C] // 2017 IEEE International Conference on Computer Vision Workshops (ICCVW), October 22-29, 2017, Venice, Italy. New York : IEEE, 2017: 501-509.







